It calculates a degree of spatial association between regionalizations using an information-theoretical measure called the V-measure
vmeasure_calc(x, y, x_name, y_name, B = 1, precision = NULL)
# S3 method for sf
vmeasure_calc(x, y, x_name, y_name, B = 1, precision = NULL)
# S3 method for stars
vmeasure_calc(x, y, x_name = NULL, y_name = NULL, B = 1, precision = NULL)
# S3 method for SpatRaster
vmeasure_calc(x, y, x_name = NULL, y_name = NULL, B = 1, precision = NULL)
# S3 method for RasterLayer
vmeasure_calc(x, y, x_name = NULL, y_name = NULL, B = 1, precision = NULL)Arguments
- x
An object of class
sfwith aPOLYGONorMULTIPOLYGONgeometry type or a spatial raster object of classRasterLayer,SpatRaster, orstars.- y
An object of class
sfwith aPOLYGONorMULTIPOLYGONgeometry type or a spatial raster object of classRasterLayer,SpatRaster, orstars.- x_name
A name of the column with regions/clusters names.
- y_name
A name of the column with regions/clusters names.
- B
A numeric value. If
B> 1 then completeness is weighted more strongly than homogeneity, and ifB< 1 then homogeneity is weighted more strongly than completeness. By default this value is 1.- precision
numeric, or object of class
unitswith distance units (but see details); see st_as_binary for how to do this.
Value
A list with five elements:
"map1" - the sf object containing the first preprocessed map used for calculation of GOF with two attributes -
map1(name of the category) andrih(region inhomogeneity)"map2" - the sf object containing the second preprocessed map used for calculation of GOF with two attributes -
map1(name of the category) andrih(region inhomogeneity)"v_measure"
"homogeneity"
"completeness"
References
Nowosad, Jakub, and Tomasz F. Stepinski. "Spatial association between regionalizations using the information-theoretical V-measure." International Journal of Geographical Information Science (2018). https://doi.org/10.1080/13658816.2018.1511794
Rosenberg, Andrew, and Julia Hirschberg. "V-measure: A conditional entropy-based external cluster evaluation measure." Proceedings of the 2007 joint conference on empirical methods in natural language processing and computational natural language learning (EMNLP-CoNLL). 2007.
Examples
library(sf)
data("regions1")
data("regions2")
vm = vmeasure_calc(x = regions1, y = regions2, x_name = z, y_name = z)
vm
#> The SABRE results:
#>
#> V-measure: 0.36
#> Homogeneity: 0.32
#> Completeness: 0.42
#>
#> The spatial objects can be retrieved with:
#> $map1 - the first map
#> $map2 - the second map
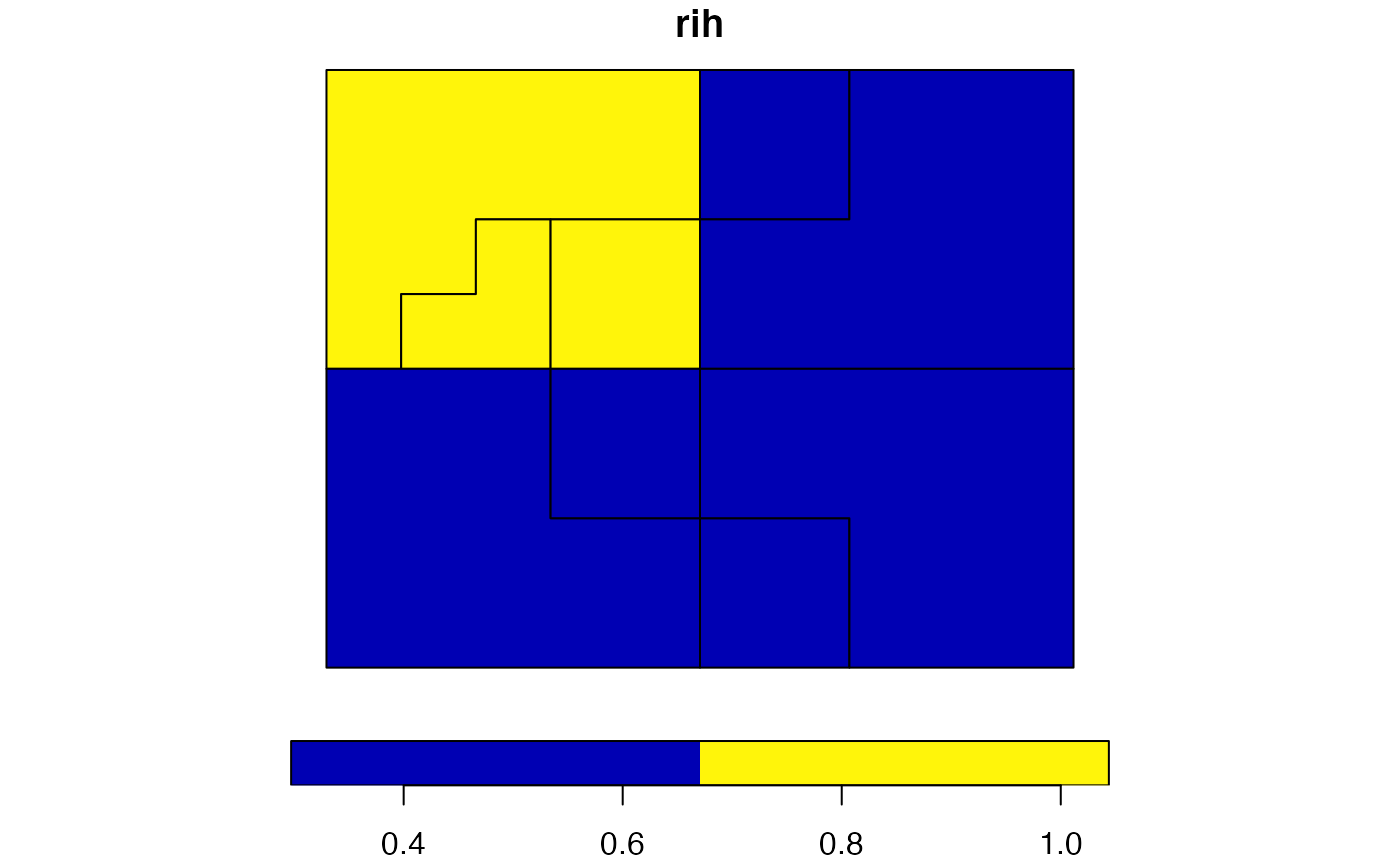
plot(vm$map1["rih"])
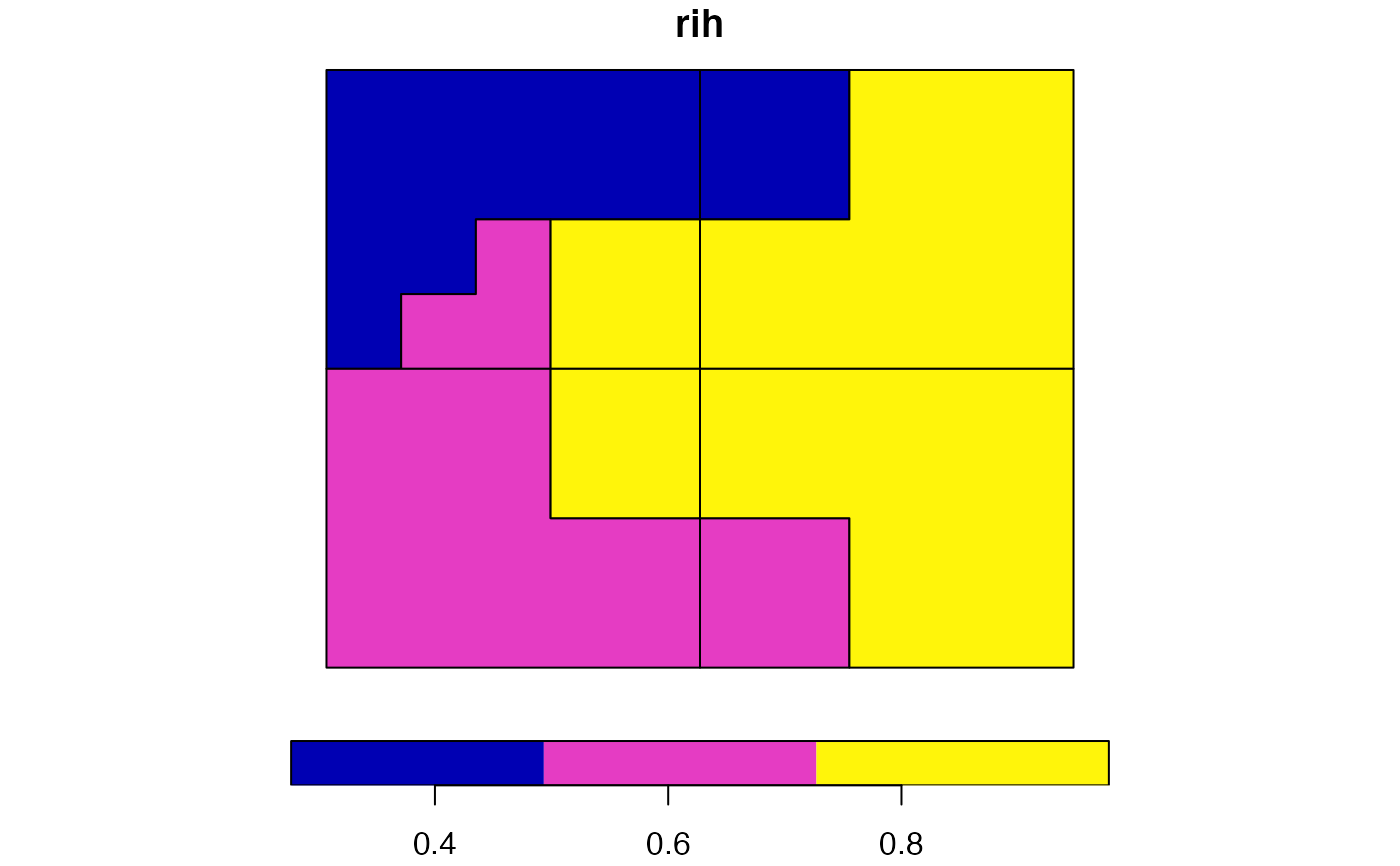
 plot(vm$map2["rih"])
plot(vm$map2["rih"])
 library(raster)
data("partitions1")
data("partitions2")
vm2 = vmeasure_calc(x = partitions1, y = partitions2)
vm2
#> The SABRE results:
#>
#> V-measure: 0.36
#> Homogeneity: 0.32
#> Completeness: 0.42
#>
#> The spatial objects can be retrieved with:
#> $map1 - the first map
#> $map2 - the second map
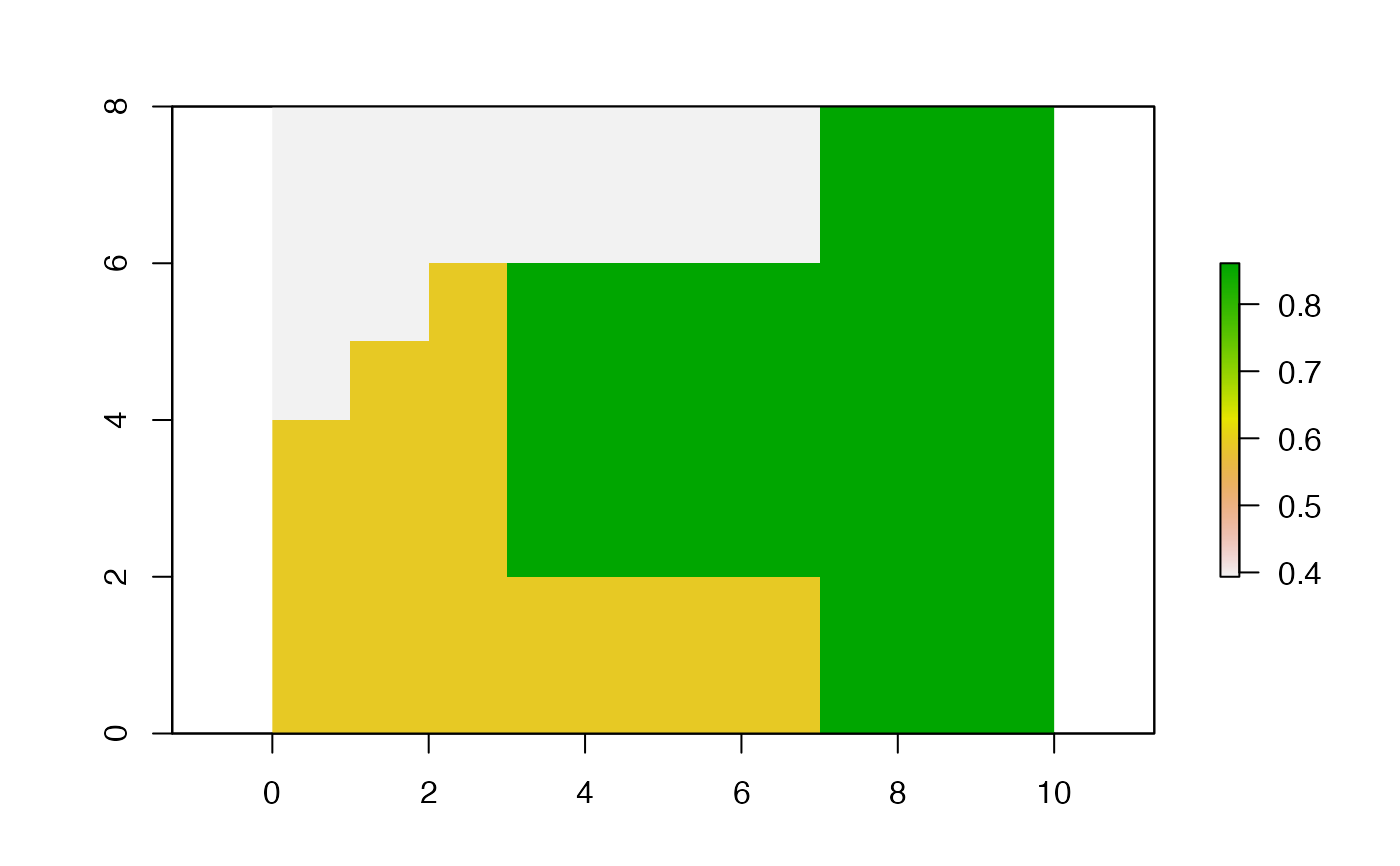
plot(vm2$map1[["rih"]])
library(raster)
data("partitions1")
data("partitions2")
vm2 = vmeasure_calc(x = partitions1, y = partitions2)
vm2
#> The SABRE results:
#>
#> V-measure: 0.36
#> Homogeneity: 0.32
#> Completeness: 0.42
#>
#> The spatial objects can be retrieved with:
#> $map1 - the first map
#> $map2 - the second map
plot(vm2$map1[["rih"]])
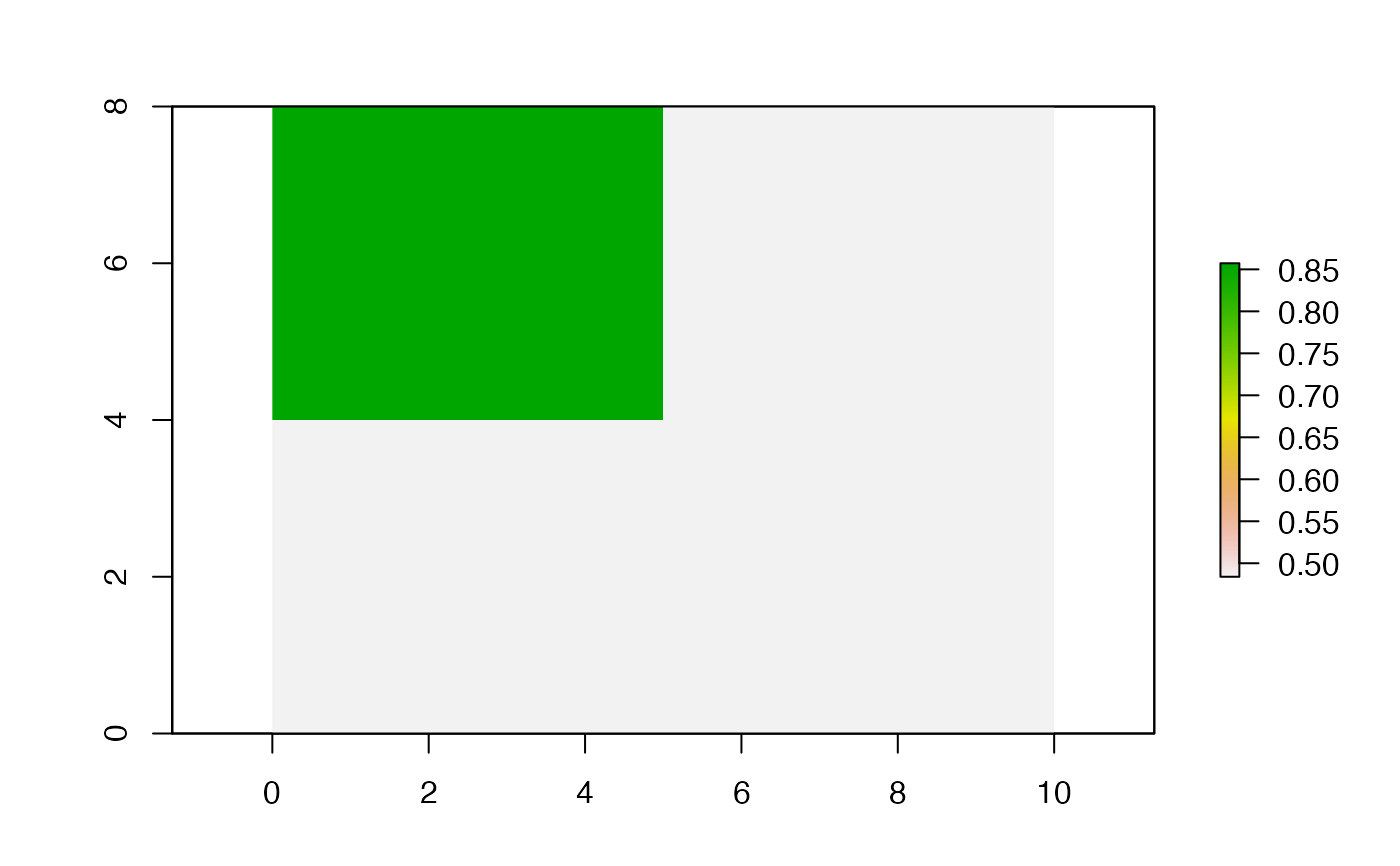 plot(vm2$map2[["rih"]])
plot(vm2$map2[["rih"]])